Zubní implantát, tedy v podstatě umělý zubní kořen, se zavádí do čelistní kosti a díky speciálně upravenému povrchu implantátu po určité době pevně přilne ke kosti. Tím dojde ke „vhojení implantátu“ (používá se označení osseointegrace),
který se stane pevnou součástí kosti a je připraven k zatížení korunkou. Pro úspěšnou osseintegraci je však nutné přesné umístění implantátu do čelistní kosti, proto by mělo vždy každému zavedení implantátu předcházet dokonalé klinické a 3D
rentgenologické vyšetření. Na základě těchto vyšetření je ve spolupráci se zubní laboratoří zhotoven finální chirurgický i protetický plán ošetření. Tento plán zahrnuje přesnou pozici, plánovanou hloubku i sklon implantátů a zhotovení chirurgické
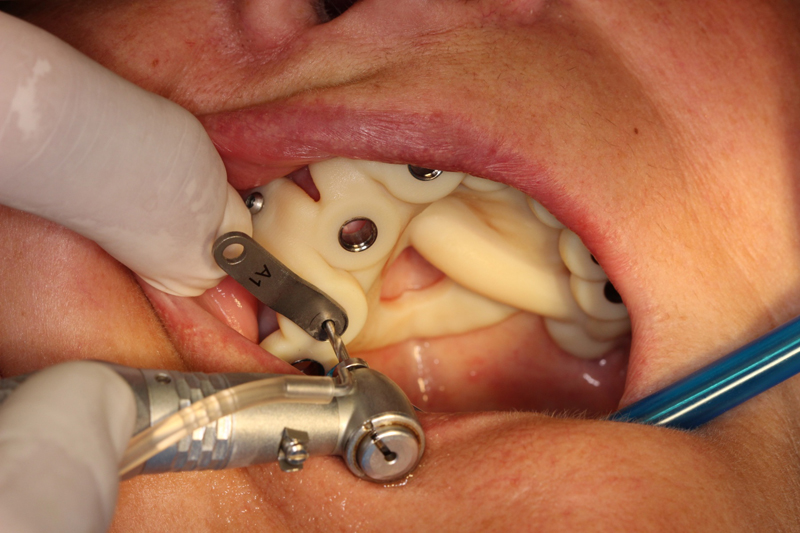
šablony pro řízenou nebo navigovanou implantaci pro perfektní finální funkční i estetický výsledek. Navigovaná/řízená implantologie operatérovi pomáhá vedením vrtáčku do kosti do přesné pozice, aby nedošlo k poranění pacienta, nepředvídatelným
komplikacím nebo zavedení do nesprávné pozice. Naše pracoviště se díky bohatým zkušenostem specializuje za implantace pomocí navigace (aktivní/pasivní) již od roku 2014, kdy postupně testujeme jednotlivé systémy a materiály, které se objevují na trhu.
Působíme jako vývojové, referenční a výukové pracoviště. Na vývoji a studiích přesnosti spolupracujeme s Ludwig Maximilian University of Munich (LMU), University for Digital Technologies in Medicine and Dentistry (DTMD) Luxembourg, DSI HUBER
Dental Science & Innovation in Munich, Mininavident AG in Basel, CH
Více na
www.navigovana-implantologie.cz
Používané přístroje, technologie
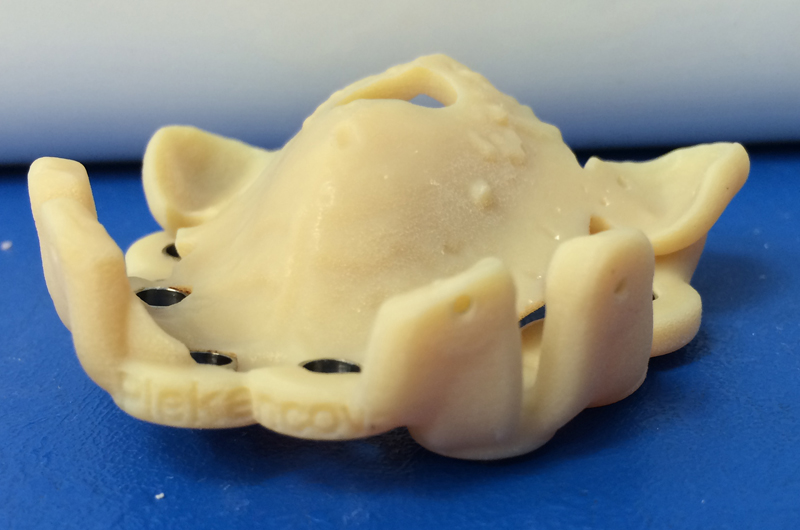
Řízená implantologie - chirurgické šablony
Principem řízené navigace pomocí chirurgických šablon je pasivní vedení zahlubovacích a rozšiřovacích vrtáčků do čelistní kosti na základě předem naplánované přesné pozice, směru, sklonu a hloubce jednoho nebo více implantátů.
Chirurgicko-protetický plán vychází z 3D rentgenu čelisti, otisku zubů a dásně (scanu zubů a dásně) a finálního návrhu protetické náhrady. Na základě těchto dat je v plánovacím softwaru coDiagnostiX vytvořena chirurgická šablona,
která je následně vytištěna na 3D tiskárně a použitá v den výkonu. Od roku 2014 jsme tuto metodu jako první v ČR začali využívat a nadále se podílíme na vývoji a vylepšování chirurgických šablon pro ještě přesnější a předvídatelnější výsledky.
Detailní postup naleznete níže.
Navigovaná implantologie – DENACAM
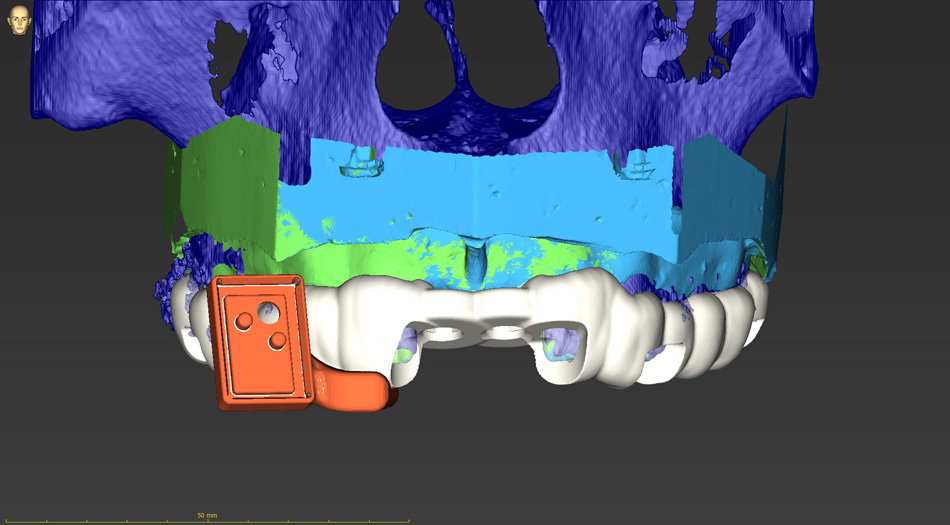
Navigovaná implantologie využívá technologii na principu GPS, kdy zobrazuje pozici, směr a sklon zahlubovacích a rozšiřovacích vrtáčků v čelistní kosti v reálném čase. Opět vlastnímu výkonu předchází přesný plán ohledně pozice, směru, sklonu
a hloubky jednoho nebo více implantátů. Chirurgicko-protetický plán vychází opět z 3D rentgenu čelisti, otisku zubů a dásně (scanu zubů a dásně) a finálního návrhu protetické náhrady. Na základě těchto dat je v plánovacím softwaru coDiagnostiX
vytvořen speciální nosič se senzorem, který poté snímá kamera na vrtačce a přenáší reálná data o poloze vrtáčku na obrazovku při výkonu.
Od roku 2015 testujeme na našem pracovišti jednotlivé systémy navigované implantologie z celého světa, v současné době používáme a podílíme se na vývoji systému DENACAM od f. Mininavident AG. Od roku 2019 probíhá na našem pracovišti studie na porovnání přesnosti mezi chirurgickými šablonami a aktivní navigací DENACAM ve spolupráci s Ludwig Maximilian University of Munich (LMU), DSI HUBER Dental Science & Innovation in Munich a Mininavident AG in Basel, CH
Detailní postup naleznete níže.
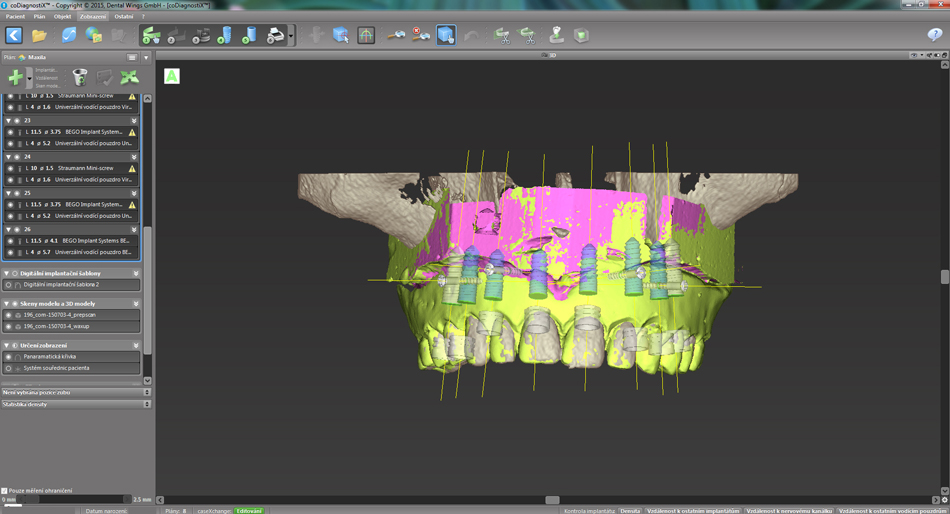
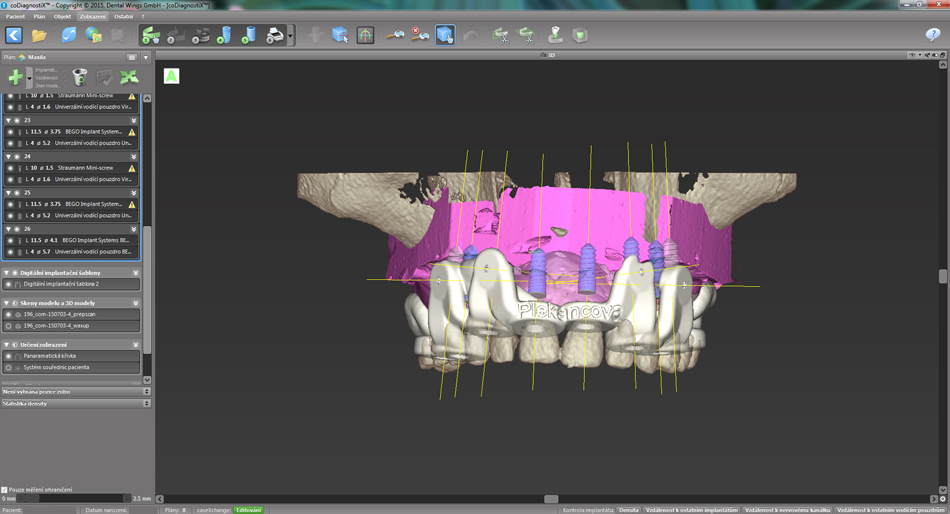
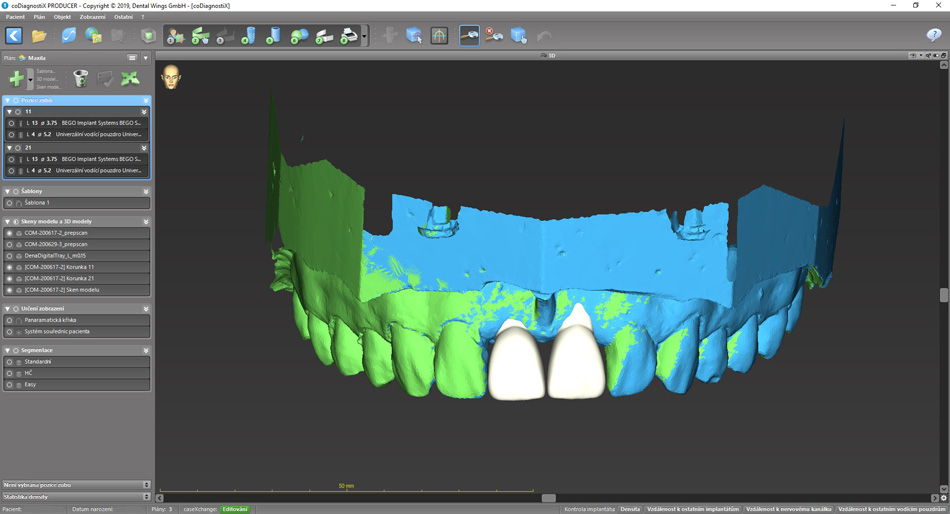
coDiagnostiX
Jedná se o externí plánovací program, spojený se zubní laboratoří a frézovacím centrem, který využívá dat získaných z 3D rentgenu čelisti, otisku zubů a dásně (scanu zubů a dásně) a finálního návrhu protetické náhrady.
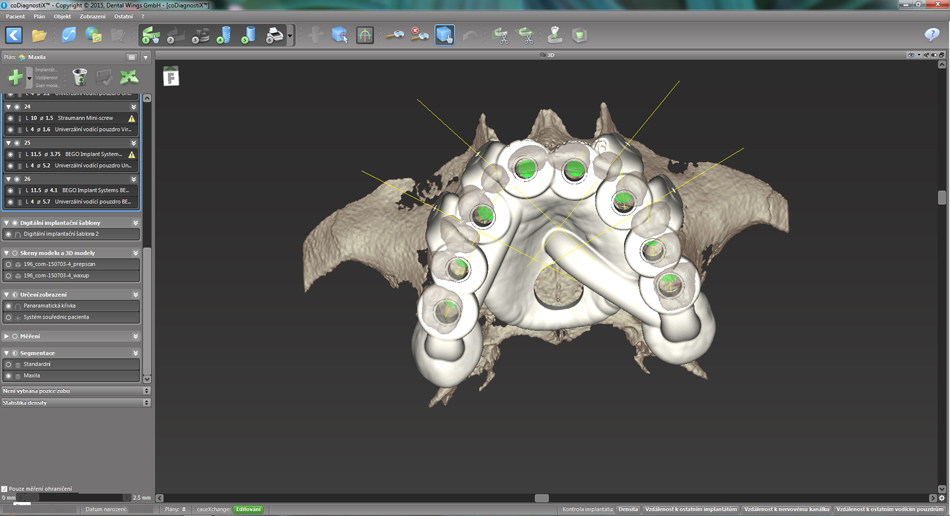
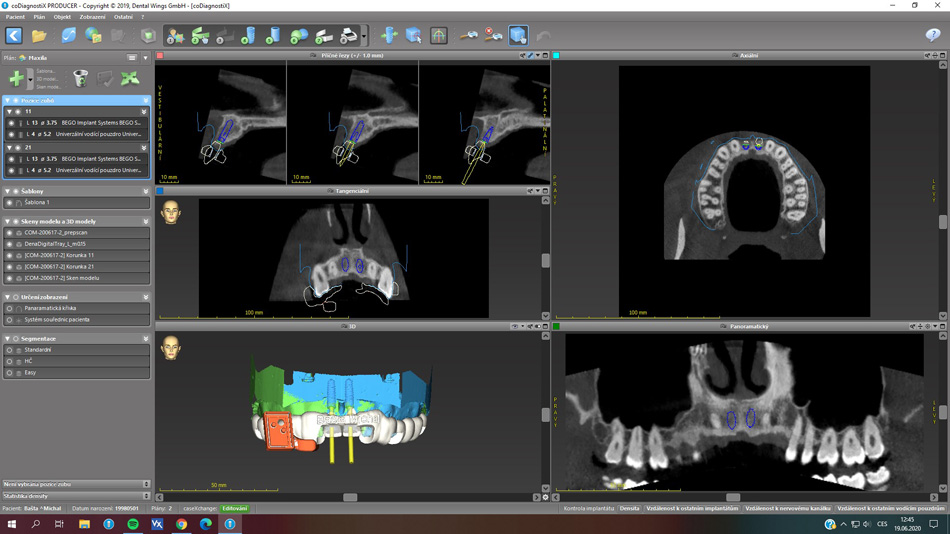
Tento program umožňuje tříprostorovou počítačovou simulaci při plánování pozic implantátů. Součástí programu je i databáze, ve které mohou být uloženy všechny typy implantátů od všech výrobců, včetně jejich délek, průměrů i tvarů.
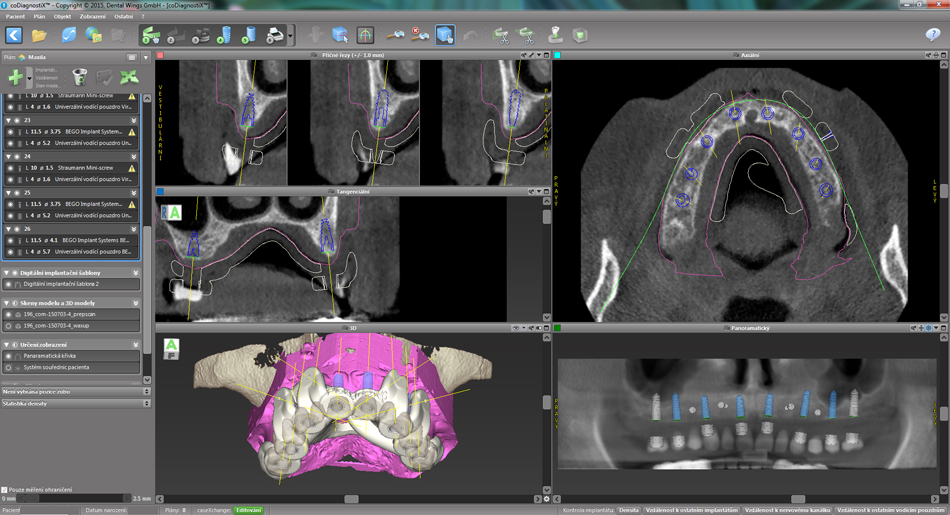
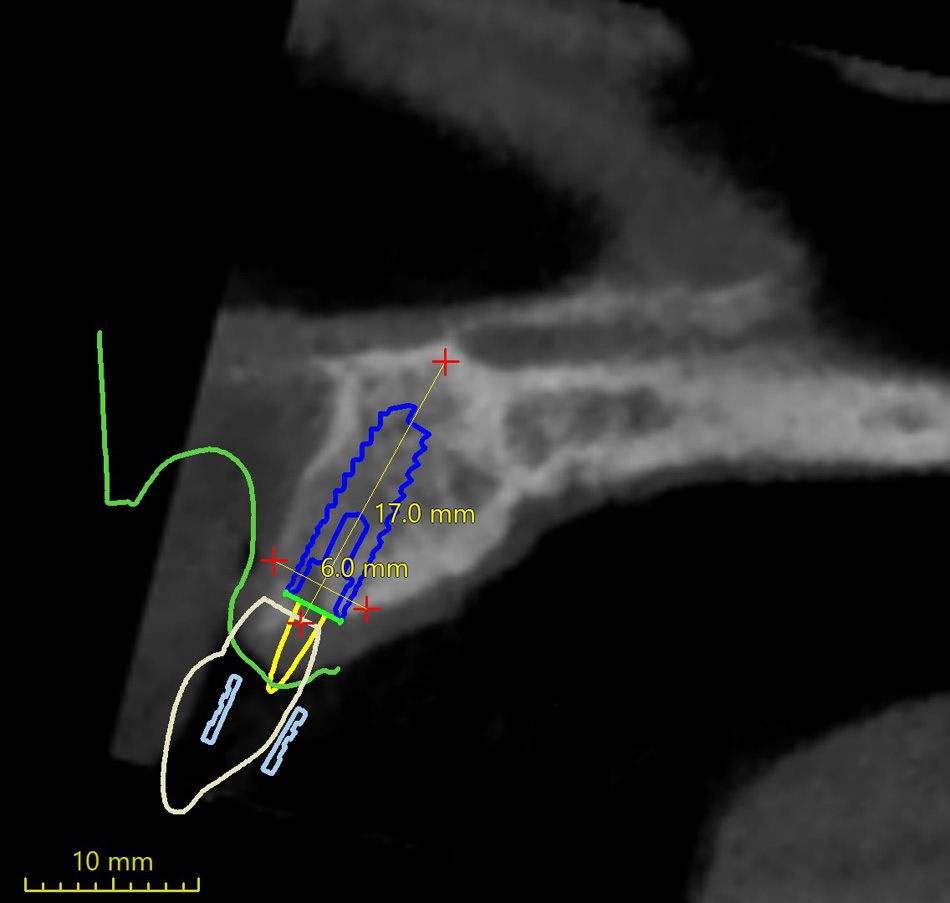
Lékař si vytvoří všechny typy zobrazení potřebných pro naplánování – tedy 2D snímky (panoramatický), příčné řezy i 3D model.
Vidí zde i důležité anatomické útvary – čelistní dutinu, průběh nervu atd. Po proměření množství kosti – šířky i výšky vybere z databáze vhodný typ implantátu a umístí ho do požadované lokality. Ihned vidí jeho pozici ve všech 3 rovinách
a na všech snímcích i 3D modelu. Může upravovat podle potřeby jeho pozici, sklon atd.
Všechny vybrané a správně umístěné simulované implantáty se ukládají do „počítačové karty“ pacienta s jejich pozicí, délkou, průměrem, typem i sklonem. V programu také lékař navrhuje chirurgické šablony pro řízenou nebo navigovanou implantaci.
Lékař i pacient tedy ještě před vlastní operací vidí, jak by mělo ošetření probíhat a vypadat.
Postup ošetření pomocí chirurgické šablon
Postup:
1) Zhotovení modelu definitivní náhrady - Set-up
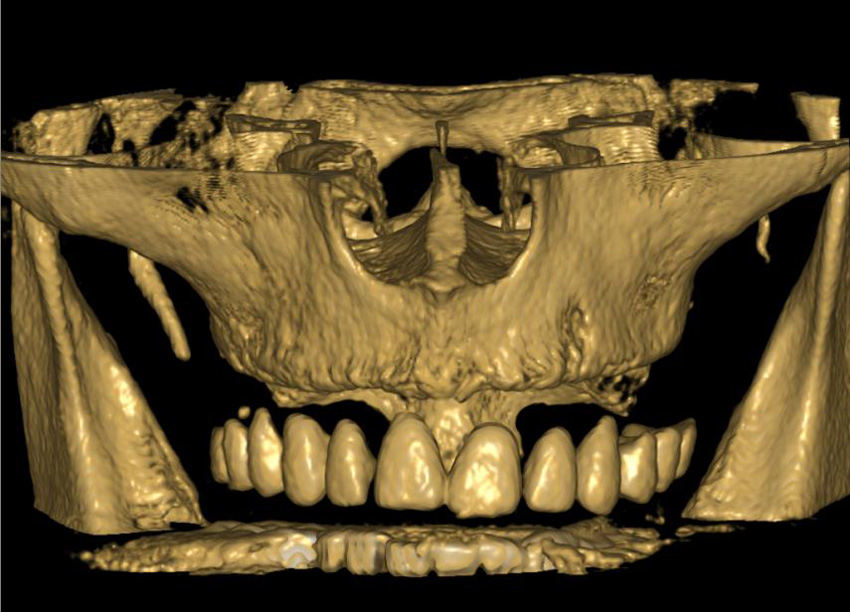
2) CB CT scan s modelem náhrady
3) Přenesení všech potřebných dat a údajů do softwaru coDiagnostiX
4) Naplánování pozic, délek a průměrů implantátů
5) Naplánování operační šablony
6) Zhotovená šablona 3D tiskem
7) Operace pomocí šablony
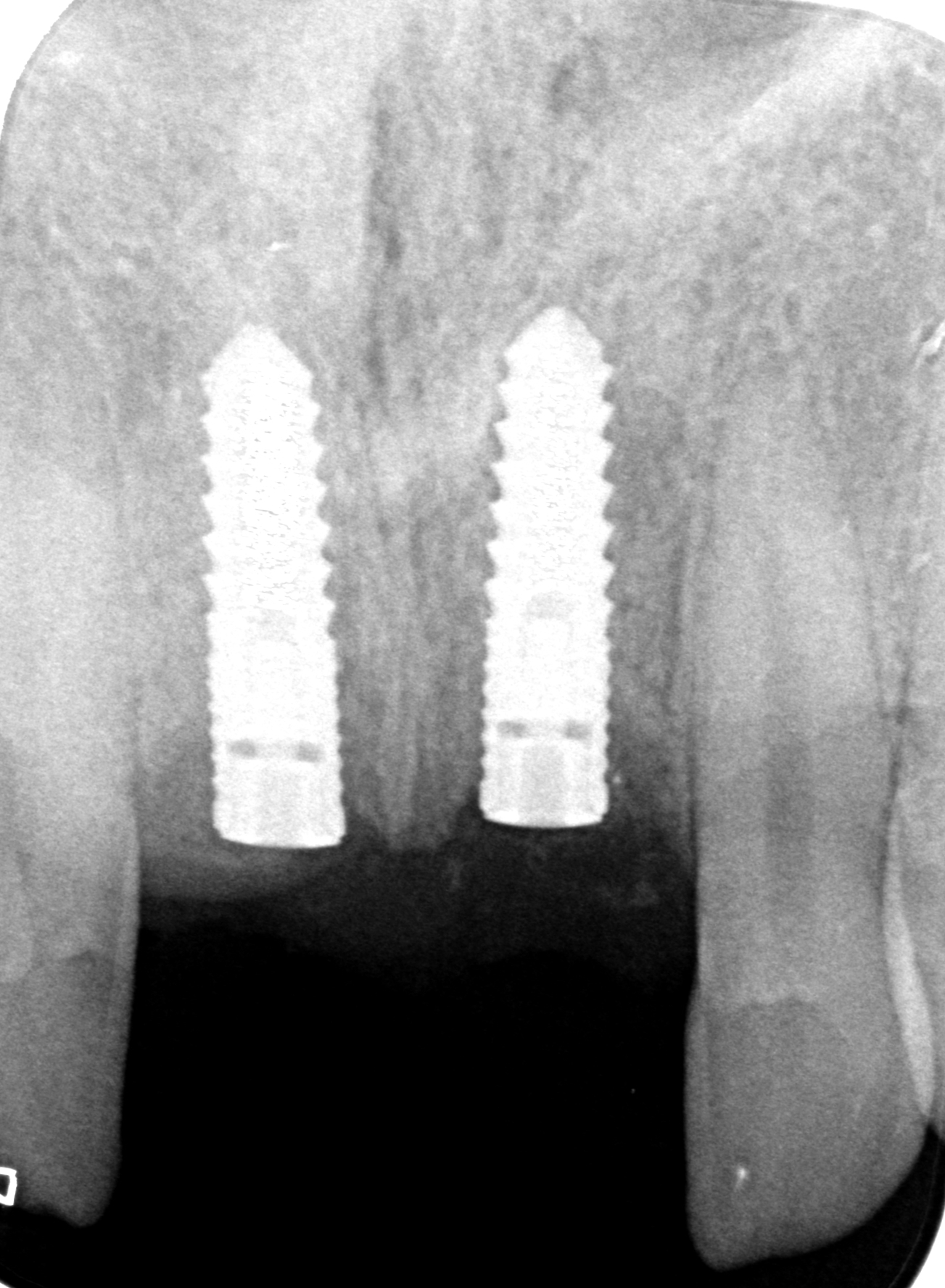
8) Kontrolní RTG snímek po operaci
Postup ošetření pomocí DENACAM
Postup:
1) Zhotovení virtuálního modelu - Set-up
2) CB CT scan pacienta, scan modelu
3) Přenesení všech potřebných dat a údajů do softwaru coDiagnostiX
4) Naplánování pozic, délek a průměrů implantátů
5) Naplánování virtuálního markeru pro navigaci
6) Operace pomocí DENACAM
8) Kontrolní RTG snímek po operaci
Pokračovat na Implantologie
Pokračovat na Augmentace
Pokračovat na Protetika na implantáty
Pokračovat na Estetická stomatologie